

Busca de Produtos

Fabricado pela Aldebaran Robotics totalmente interativo, divertido e em constante evolução, NAO robô é uma plataforma confiável para o ensino de alunos em diferentes níveis.
Por que ensinar com robôs?
Robótica é uma das mais recentes inovações tecnológicas, e um robô humanoide é uma ferramenta de aprendizagem ideal para aulas em todos os níveis.
Robôs permitem que os alunos conectem a teoria com a prática e descubram uma grande variedade de campos relacionados a robótica, tais como ciência da computação, engenharia e matemática.
Os estudantes ganham experiência prática usando o NAO, e quando usado no laboratório, eles descobrem temas interessantes, tais como locomoção, áudio e processamento de sinal de vídeo, reconhecimento de voz, e muito mais.
O NAO também permite aos professores a integrar o trabalho em equipe, gestão de projetos, resolução de problemas e habilidades de comunicação em um ambiente estimulante. NAO oferece a flexibilidade para o desenvolvimento de projetos interdisciplinares.
Plataforma de Hardware
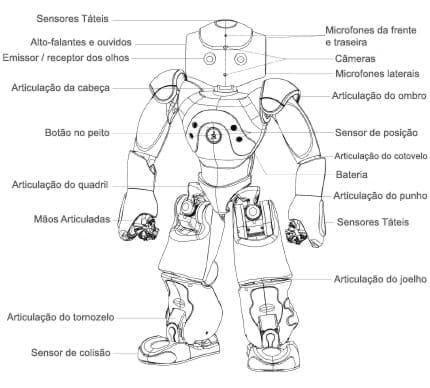
NAO é um robô humanoide programável, de 57 centímetros de altura com os seguintes componentes principais:
- Corpo com 25 graus de liberdade (DOF), cujos elementos-chave são os motores elétricos e atuadores;
- Rede de sensores, incluindo 2 câmeras, quatro microfones, rangefinder sonar, dois emissores e receptores de IR, uma placa inercial, 9 sensores táteis, e 8 sensores de pressão;
- Vários dispositivos de comunicação, incluindo sintetizador de voz, luzes de LED, e dois alto-falantes de alta fidelidade;
- Primeira CPU Intel ATOM 1,6 GHz (localizado na cabeça) que executa um kernel do Linux e suporta middleware proprietário Aldebaran (NAOqi). Segunda CPU (localizado no tronco)
- Bateria com 27,6-watt-hora que fornece ao NAO uma autonomia de 1:50h ou mais dependendo da utilização.
NAOqi
A criação de aplicativos de robótica é um desafio. Os blocos de construção de aplicações robóticas inclui o estado-da-arte, tecnologias complexas, como o reconhecimento de voz, reconhecimento de objetos e mapeamento objeto.
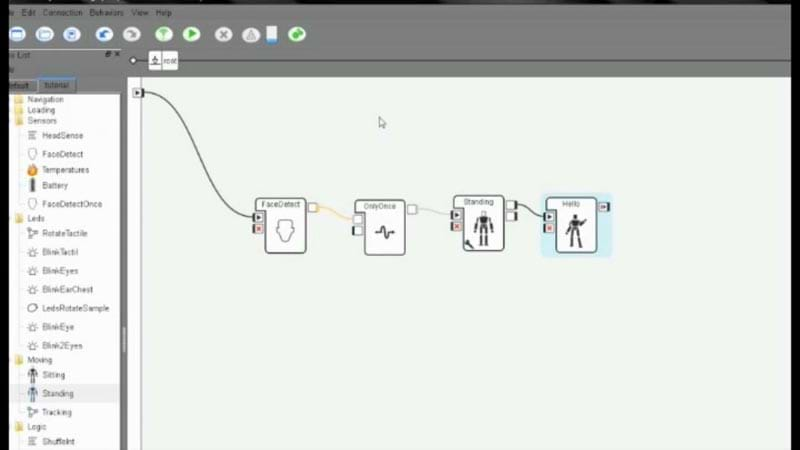
NAOqi, o software embutido ao NAO, inclui uma rápida, segura e confiável, multi-plataforma, distribuídos estrutura robótica que fornece uma base sólida sobre a qual os desenvolvedores podem alavancar e melhorar a funcionalidade NAO.
NAOqi permite algoritmos para compartilhar suas APIs com os outros e ajuda a preparar módulos para rodar em PCs remotos ou na plataforma NAO.
Desenvolvimento de código pode ser feito em Windows, Mac OS ou Linux em muitas línguas, incluindo C + +, Python, Urbi, e. Líquido. Módulos construídos em cima deste quadro oferecer APIs rico para interagir com NAO. NAOqi atenda às necessidades comuns de robótica: paralelismo, recursos de sincronização, e eventos.
NAOqi permite a comunicação homogênea entre diferentes módulos (movimento, áudio e vídeo), programação homogênea e compartilhamento de informações homogêneas com ALMemory.
Movimento
Caminhada Unidirecional
O Robô NAO caminha utilizando um modelo dinâmico simples (pêndulo linear inversa) e programação quadrática. Ele é estabilizado através de feedback de sensores em conjunto. Tornando o resistente às pequenas perturbações, e oscilações nos planos frontal e lateral. NAO pode andar em uma variedade de pisos, como carpete, azulejos e pisos de madeira, podendo fazer a transição entre essas superfícies durante a caminhada.
Movimento do Corpo Todo
O movimento do robô NAO é baseado em generalizadas cinemática inversa, que lida com coordenadas cartesianas, o controlo conjunto, equilíbrio, redundância, e prioridade de tarefas. Isso significa que, ao pedir NAO estender seu braço, ele se curva sobre porque os seus braços e as articulações das pernas são tidos em conta. NAO vai parar seu movimento para manter o equilíbrio.
Gerenciamento de Queda
O Gerenciamento de queda protege o robô NAO quando cai. Sua principal função é detectar quando o centro de massa do NAO (CdM) desloca fora do polígono de apoio.
O polígono de suporte é determinada pela posição do pé ou os pés em contato com o solo. Quando é detectada uma queda, todas as tarefas de movimento são mortos e, dependendo da direção, os braços de NAO assumem posicionamento de proteção, o CM é diminuído, e a rigidez do robô é reduzida a zero.
Visão
O robô NAO tem duas câmeras de 920p, que podem capturar até 30 imagens por segundo, e pode acompanhar, aprender e reconhecer imagens e rostos.
A primeira câmera, localizado na testa do NAO, perscruta o horizonte, enquanto a segunda, situado ao nível da boca verifica as imediações.
O software permite a recuperação de fotos e transmissões de vídeo do que robô NAO vê.
Mas os olhos só são úteis se você pode interpretar o que vê. É por isso que NAO contém um conjunto de algoritmos para detecção e reconhecimento de faces e formas. NAO pode reconhecer quem está falando com ele ou encontrar uma bola ou, eventualmente, objetos mais complexos.Esses algoritmos foram desenvolvidos especialmente, com constante atenção ao uso de um mínimo dos recursos do processador.
Além disso, SDK NAO permite desenvolver seus próprios módulos de interface com OpenCV (o Open Source Computer Vision biblioteca originalmente desenvolvida pela Intel).
Desde que você pode executar em diretamente conectado ao NAO robô, ou transferi-los para um PC conectado ao NAO, você facilmente pode usar as funções de exibição OpenCV para desenvolver e testar seus algoritmos com feedback.
Áudio
O NAO utiliza quatro microfones para acompanhar sons, e seu reconhecimento de voz e texto permitem que ele se comunique em 8 idiomas.
Localização de Sons
Um dos principais objetivos dos robôs humanoides é interagir com as pessoas. A Localização de som permite a um robô identificar a direção dos sons. Para produzir resultados robustos e úteis ao CPU reunião e requisitos de memória, NAO localização da fonte sonora é baseada em uma abordagem conhecida como "diferença de tempo de chegada."
Quando uma fonte vizinha emite um som, cada uma dos quatro microfones recebe a onda sonora em tempos ligeiramente diferentes.
Por exemplo, se alguém fala com NAO no seu lado esquerdo, a onda sonora correspondente primeira atinge os microfones esquerdos, em seguida, os microfones de frente e de trás de alguns milissegundos mais tarde, e, finalmente, o microfone direito.
Estas diferenças, conhecidas como a diferença de tempo interaural (ITD), pode então ser processado para determinar matematicamente a localização atual da fonte emissora.
Resolvendo a equação de cada vez que ouve um som, NAO pode determinar a direção da fonte emissora.
Este recurso está disponível como um módulo chamado NAOqi AL AudioSource Localization, que prevê uma linguagem C + + e API do Python que permite interações precisas com um script Python ou módulo NAOqi.
As aplicações possíveis incluem:
- Detecção humana, Rastreamento e Reconhecimento
- Detecção de Objeto Noisy, Rastreamento e Reconhecimento
- Reconhecimento de fala em uma direção específica
- Reconhecimento falante em uma direção específica
- Monitoramento Remoto / Segurança aplicações
- Aplicações de entretenimento
Processamento de Sinal de Áudio
Em robótica, processadores embarcados têm limitado poder computacional, tornando-o útil para realizar alguns cálculos remotamente em um computador desktop ou servidor.
Isto em especial para o processamento de sinal de áudio, por exemplo, o reconhecimento de voz, muitas vezes acontece de forma mais eficiente, mais rápida e mais precisa de um processador remoto. Mais modernos smartphones processam o reconhecimento de voz remotamente.
O usuário pode querer usar seus próprios algoritmos de processamento de sinal diretamente no robô.
O quadro NAOqi usa Simple Object Access Protocol (SOAP) para enviar e receber sinais de áudio através da web.
O som é produzido e gravado no NAO usando o Advanced Linux Sound Architecture (ALSA) biblioteca.
O módulo AL Audio Device gerencia entradas e saídas de áudio.
Usando recursos de áudio do NAO, uma ampla gama de experiências e pesquisas podem ter lugar nas áreas de comunicação e interação homem-robô.

Sensores Táteis
Além de câmeras e microfones, NAO é equipado com sensores capacitivos posicionados no topo de sua cabeça em três seções e em suas mãos.
Você pode portanto dar informações NAO através do toque: pressionar uma vez para dizer-lhe desligado, por exemplo, ou utilizando os sensores como uma série de botões para acionar uma ação associada.
O sistema vem com luzes LED que indicam o tipo de contato. Você também pode programar sequências complexas.

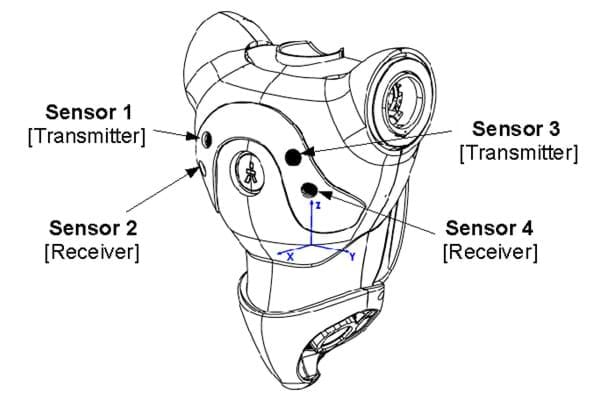
Sensores de Posição
O NAO é equipado com dois canais de sensores ultrassónicos para posição : dois transmissores e dois receptores.
Eles permitem que NAO possa estimar as distâncias e obstáculos em seu ambiente. A gama de detecção é de 0-70 cm.
Conectividade Ethernet e Wi-Fi
O NAO atualmente suporta Wi-Fi (BGN) e Ethernet, os protocolos de comunicação mais difundidos da rede. Além disso, os emissores-receptores de infravermelhos nos olhos permitir a ligação a objetos no ambiente.
Também é compatível com o IEE 802.11g Wi-Fi padrão e pode ser usado em ambas as redes WPA e WEP, tornando possível a ligação de mais redes domésticas e. OS NAO suportam Ethernet e Wi-Fi e não requer nenhuma configuração de Wi-Fi que não inserir a senha.
E capacidade para se conectar a redes oferece uma ampla gama de possibilidades. Você pode pilotar e programa NAO utilizando qualquer computador na rede.
Aqui estão alguns exemplos de aplicações de usuários NAO já criados:
- Com base no endereço IP NAO, NAO pode descobrir sua localização e dar-lhe um relatório do tempo personalizada.
- Pergunte NAO sobre um assunto e ele se conecta a Wikipedia e ler-lhe a entrada relevante.
- Usando a tecnologia XMPP (como no sistema de bate-papo do Google), você pode controlar remotamente NAO e streaming de vídeo a partir de suas câmeras.
Infravermelho
Através de infravermelhos, NAO pode se comunicar com outros GON e outros dispositivos que suportam infravermelho. Você pode configurar NAO usar infravermelho para controlar outros dispositivos ("NAO, por favor, ligue a TV"). Além disso, NAO também pode receber instruções de emissores de infravermelho, como controles remotos. E, claro, dois GON podem se comunicar uns com os outros diretamente.
Infravermelho já é o método mais comum de controlar dispositivos, tornando NAO facilmente adaptável para aplicações de domótica.NAO também pode detectar se um sinal infravermelho recebido é vindo da esquerda ou da direita.
Open Source
Com mais de cinco anos de experiência em desenvolvimento de sistemas embarcados para plataformas robóticas, Aldebaran Robotics está compartilhando sua plataforma cruzada construir ferramentas, a biblioteca de comunicação do núcleo, e outros módulos essenciais com pesquisadores, desenvolvedores e projetos emergentes na área da robótica humanóide.
Capitalizando experiência Aldebaran Robotics, os usuários podem concentrar seus esforços na criação de aplicações inovadoras e excitantes.
Além disso, os usuários se beneficiam da forte inovação que caracteriza o crescimento da comunidade NAO.
Robótica e seus aplicativos associados são ainda áreas emergentes de pesquisa.Colaboração em explorar futuras aplicações e intercâmbio permanente dentro da nossa comunidade de usuários são essenciais.